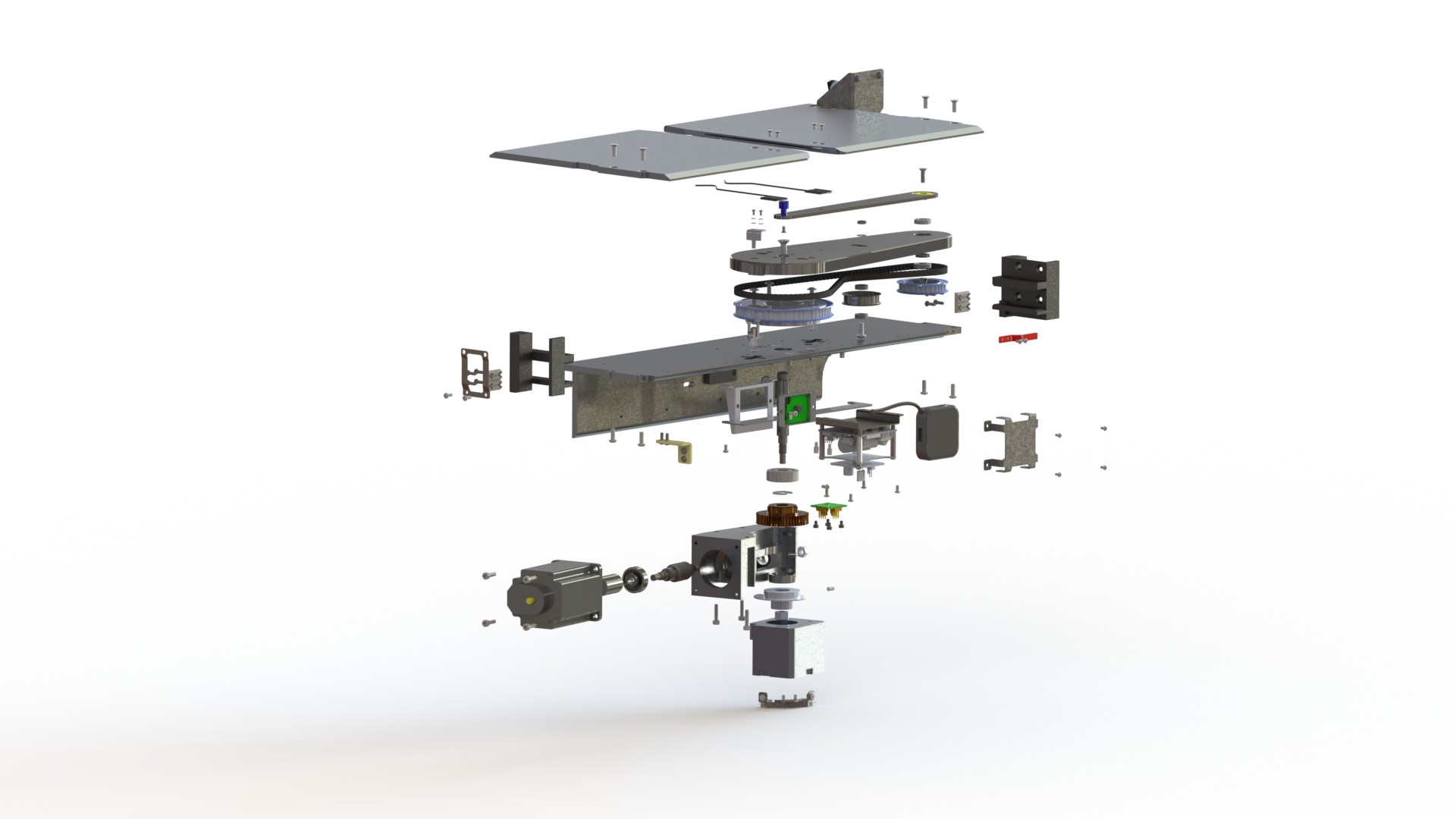
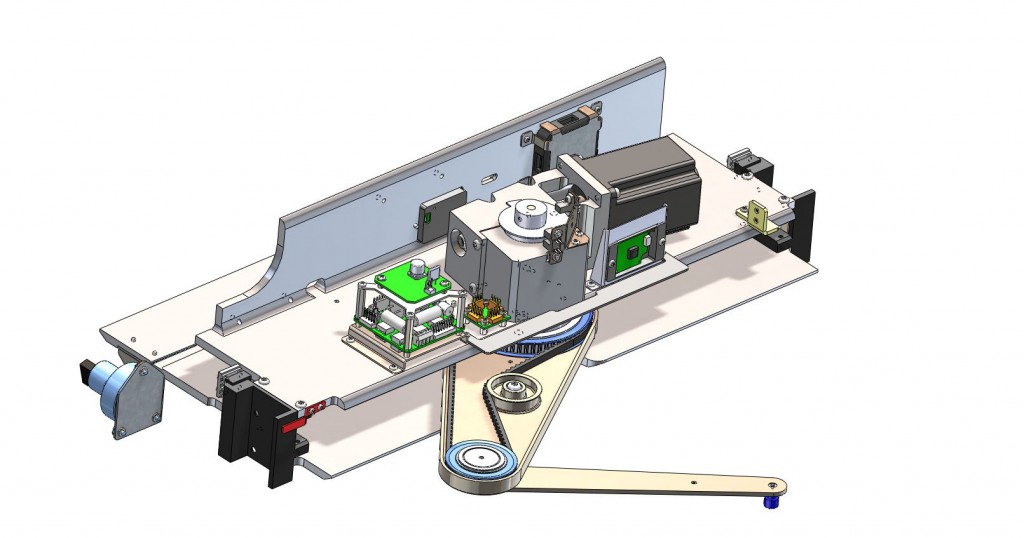
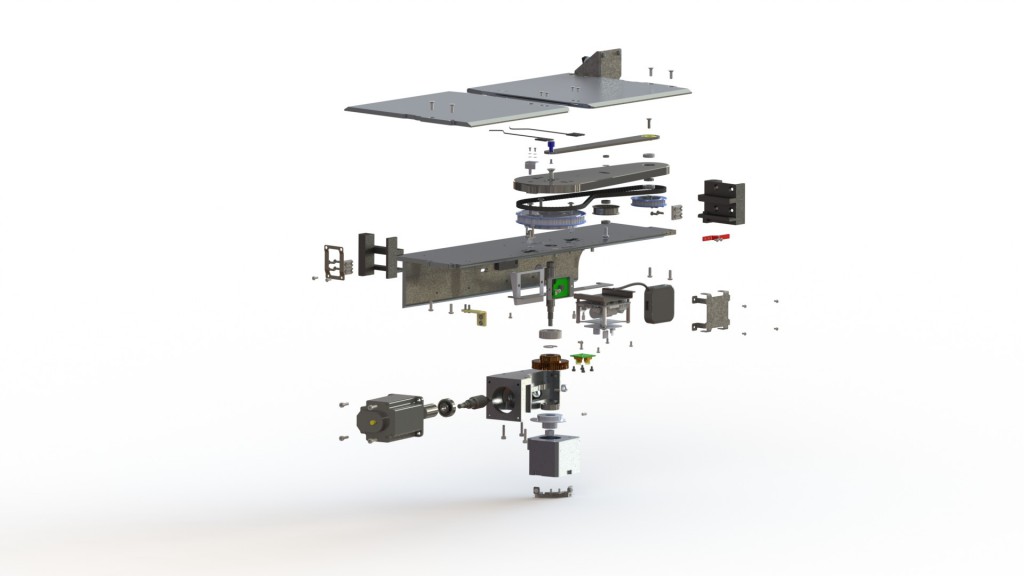
We developed a 3-axis robot for an automated kiosk that stores, retrieves, and vends products. To keep the number of actuators to a minimum, the engineering team devised a double link, belt driven, pick and place robot arm for one axis and a belt driven carriage on linear guide arhictecture for the other 2 axes.
We sized and sourced motors, drivetrain components, motor controllers, and linear guides for the mechanism. We helped with the pilot build, built protoypes, and tested the alpha and beta prototypes.

{kind=link}